Body-wide coverage
Extends across torso, joints, limbs, and end-effectors.
NeuroSkin U Full-body Electronic Skin System
Body-wide sensing · flexible conformity · real-time response · data driven
NeuroSkin™ combines UltraMatrix™ arrays and flexible materials into robotic electronic skin.
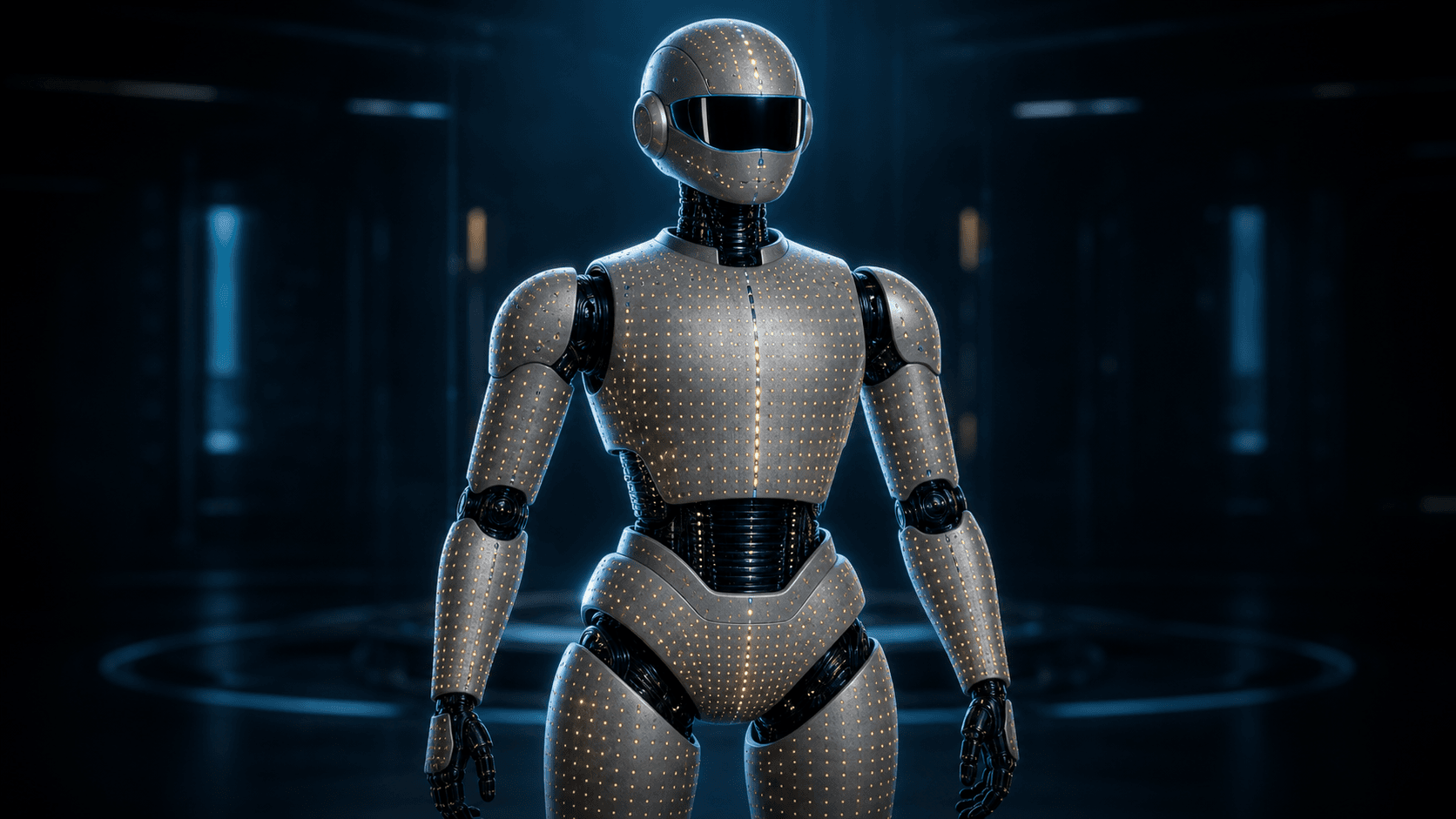
VISIONVision lets AI see the world
TOUCHTouch lets AI trust the world
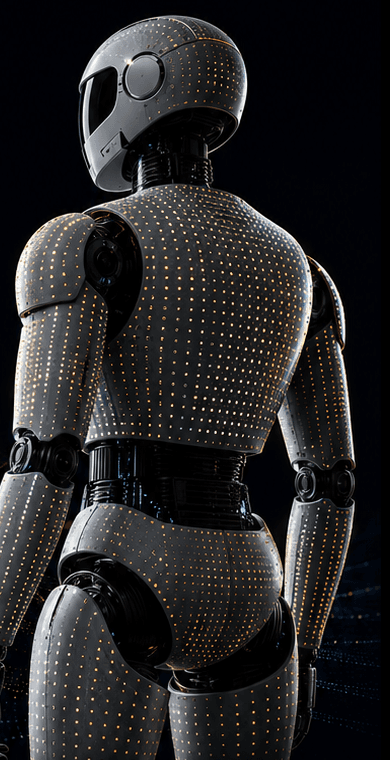
Extends across torso, joints, limbs, and end-effectors.
Captures pressure, contact, friction, and deformation.
Fast feedback for immediate and safer interaction control.
Stretches, bends, and twists like a second skin.
Collects real interaction data for tactile world models.
Thin and adaptable for multiple robot structures.
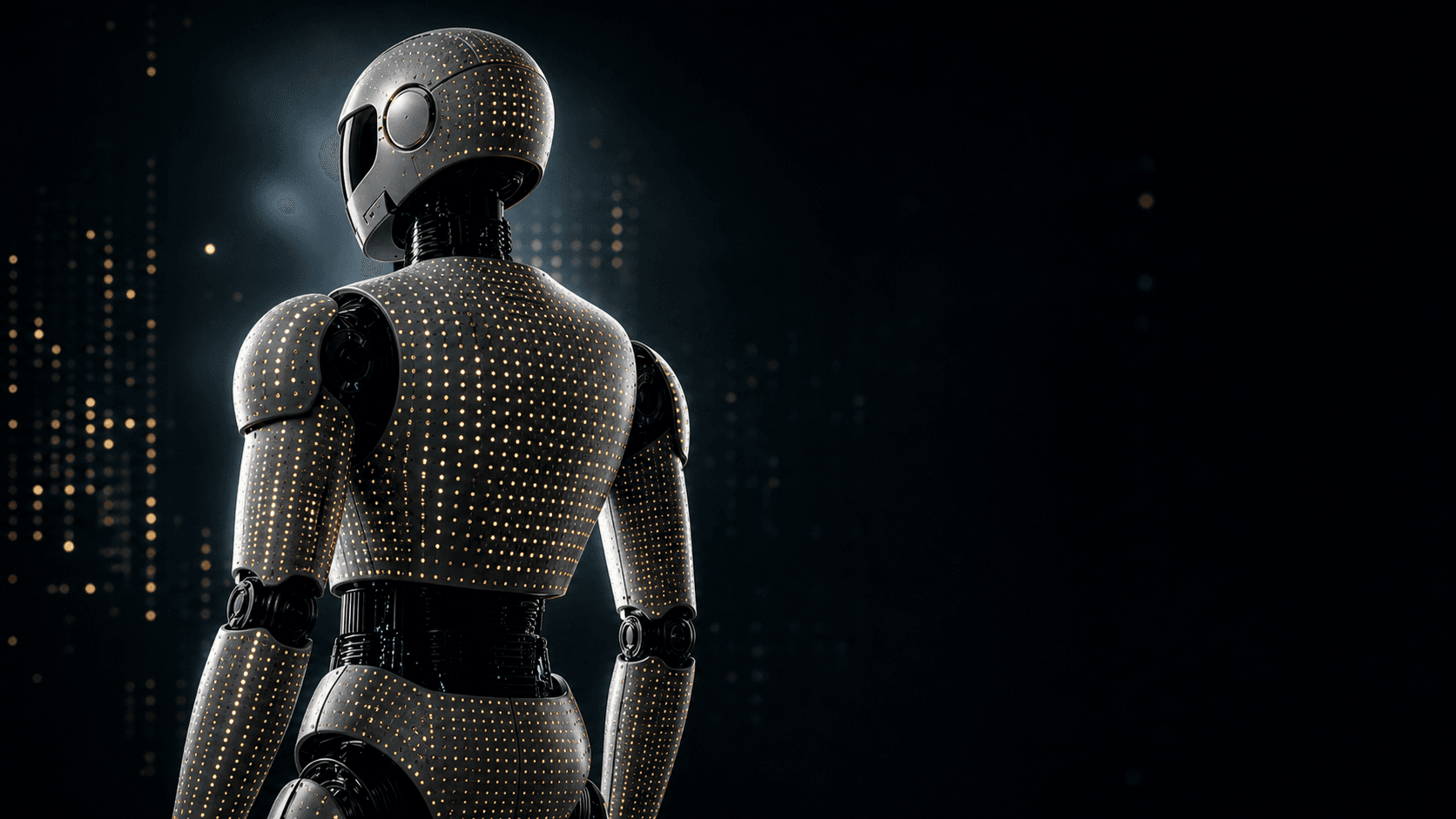
Full-spectrum tactile sensing
Body-wide sensing and safe interaction
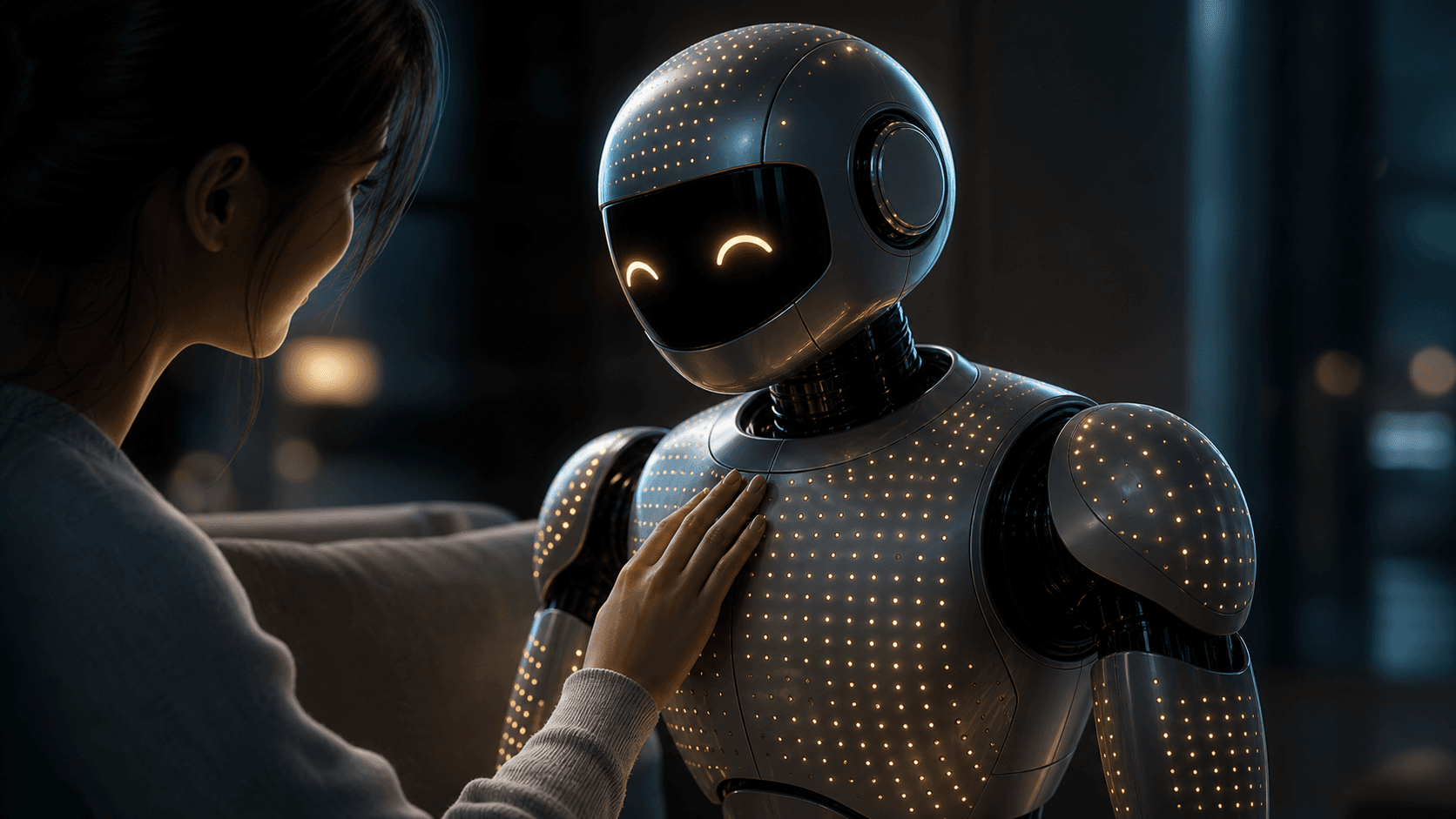
Emotional interaction and touch feedback
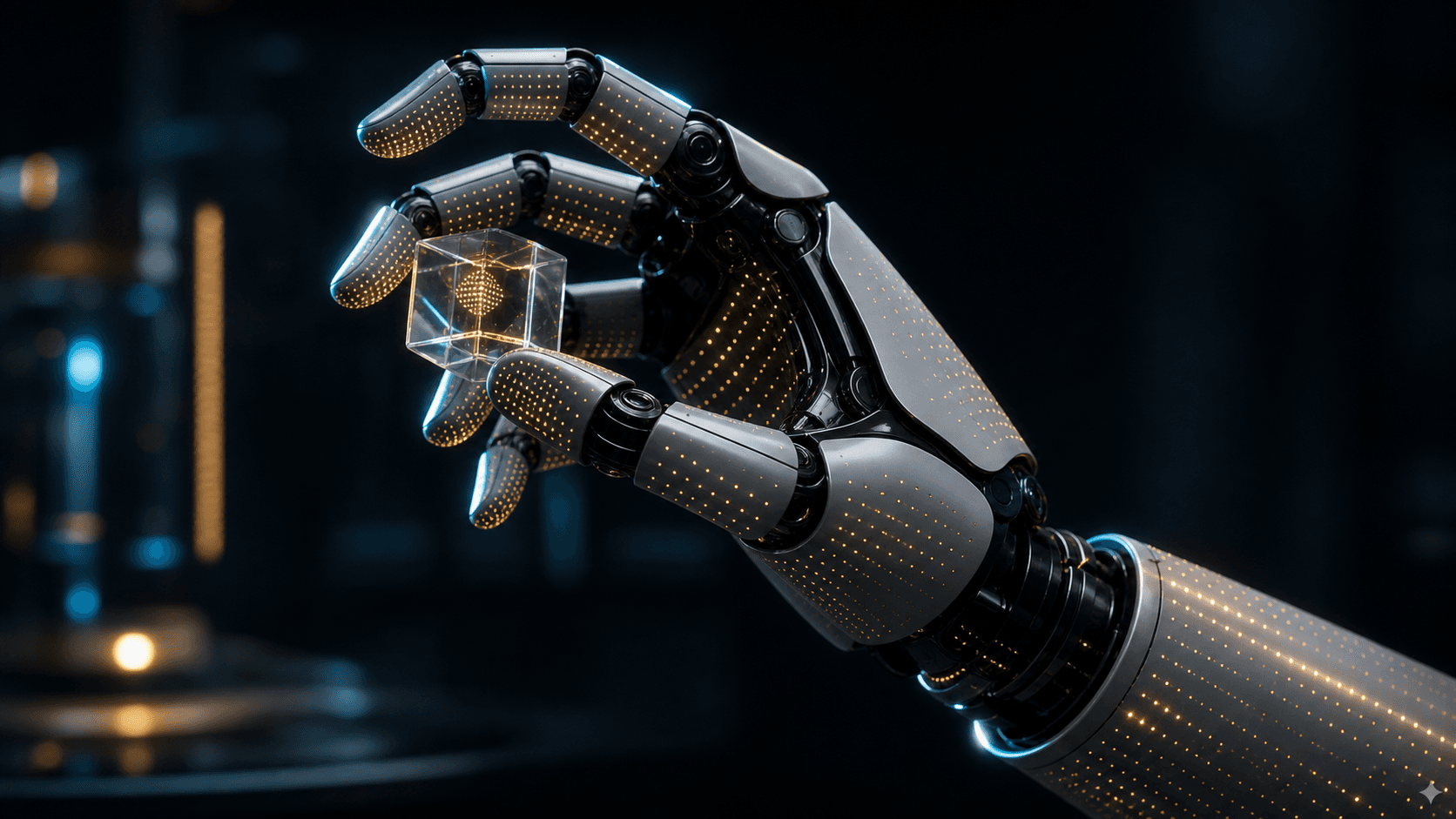
Fine manipulation and stable grasping

Environmental interaction and terrain sensing
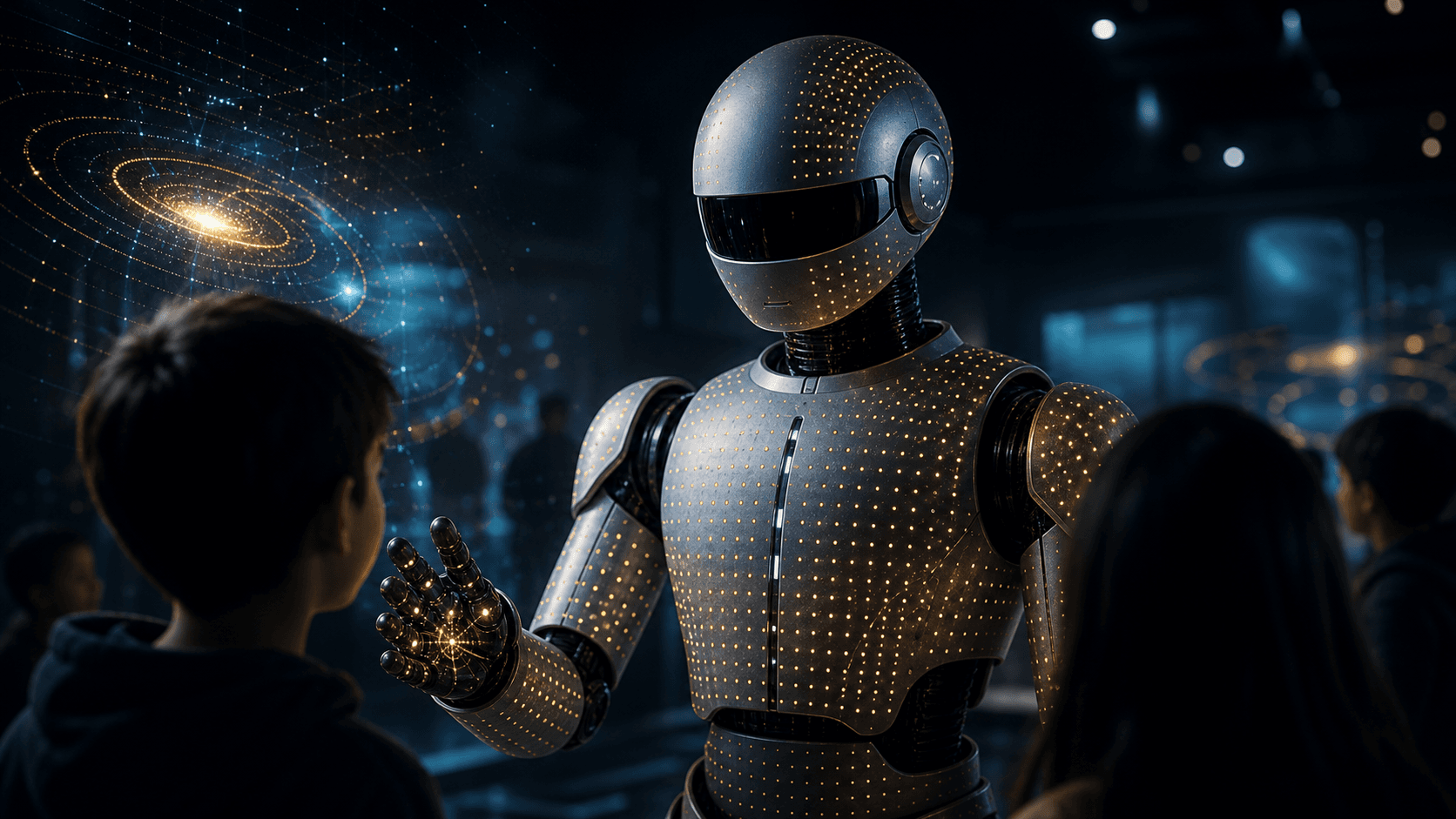
Immersive interactive experiences
Robots understand the physical world and interact safely with people.
Continuous sensing across torso, limbs, joints, and end-effectors.
Thin, soft, and conformal for complex surfaces and motion.
Real interaction data returns to improve models over time.
Real-time contact state supports more trustworthy collaboration.