识别形状、位置与边界
让 AI 拥有真实的触觉让机器人理解真实世界
具身智能时代的Physical Intelligence Infrastructure
深圳市触曼感知技术有限公司(NeuroSkin)专注于柔性触觉感知、机器人电子皮肤与 Physical Intelligence 基础设施,致力于构建机器人时代的物理交互数据层,让 AI 不仅看见世界,更理解、感知并与世界真实互动。
柔性触觉感知
超高密度触觉阵列全域曲面共形感知
机器人电子皮肤
覆盖全身的触觉网络赋予机器人“第二层皮肤”
Physical AI 基础设施
构建物理交互数据层驱动具身智能进化
触觉智能引擎
Touch Intelligence Engine让机器理解接触、力量与动作
触觉世界模型
Tactile World Model让机器建立真实世界的物理认知
数据飞轮驱动
真实世界数据闭环越部署,越智能
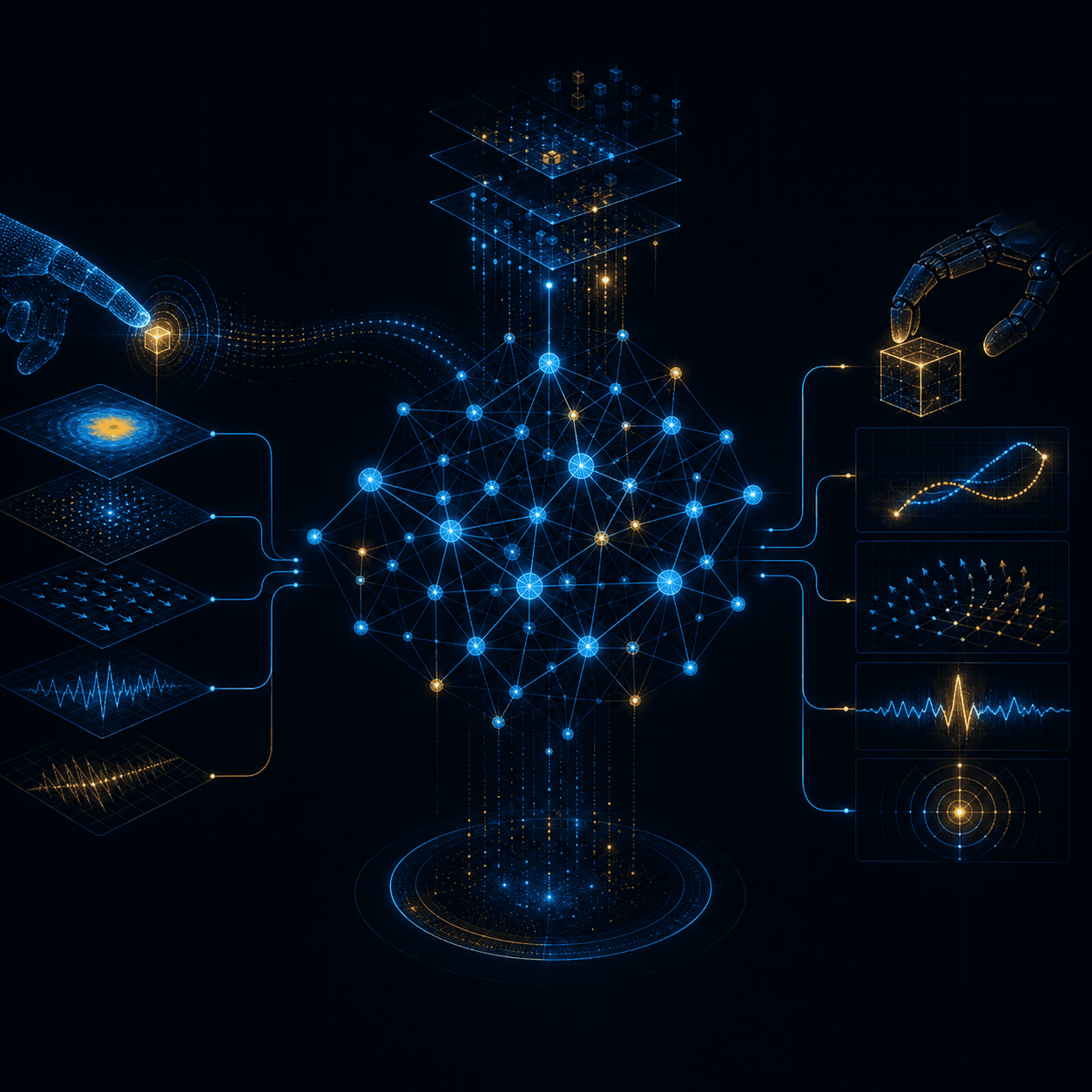
Why Touch Matters
触觉让 AI 相信世界
视觉告诉 AI 物体在哪里、长什么样;语言帮助它推理“可能发生什么”。只有触觉把接触、力量、摩擦、滑移与形变反馈成数据,让 AI 知道自己真的碰到了世界。
真实接触触觉信号可信物理认知
ContactForceFrictionSlipTextureDeformation
机器人最难解决的问题,并不是看见,而是接触之后发生的一切。

组织知识、指令与推理
验证接触、力量与变化
Physical Intelligence Infrastructure
核心能力:触觉模型平台
NeuroSkin 不只是提供触觉器件,而是把柔性触觉阵列、机器人电子皮肤与真实交互场景连接成可持续训练的触觉数据系统。
Core PlatformTactile Model Platform
持续采集接触、力、滑移、纹理与形变数据,训练机器人理解“接触之后发生的一切”。
触觉硬件部署真实交互数据触觉模型训练机器人能力增强
把真实接触转化为可训练、可回流、可持续增长的数据资产。
学习接触、力量、滑移、摩擦与形变之间的物理关系。
反哺灵巧操作、抓取稳定性和机器人世界模型能力。
我们构建的不只是触觉器件。
我们构建的是触觉模型平台和真实世界物理交互的数据闭环。
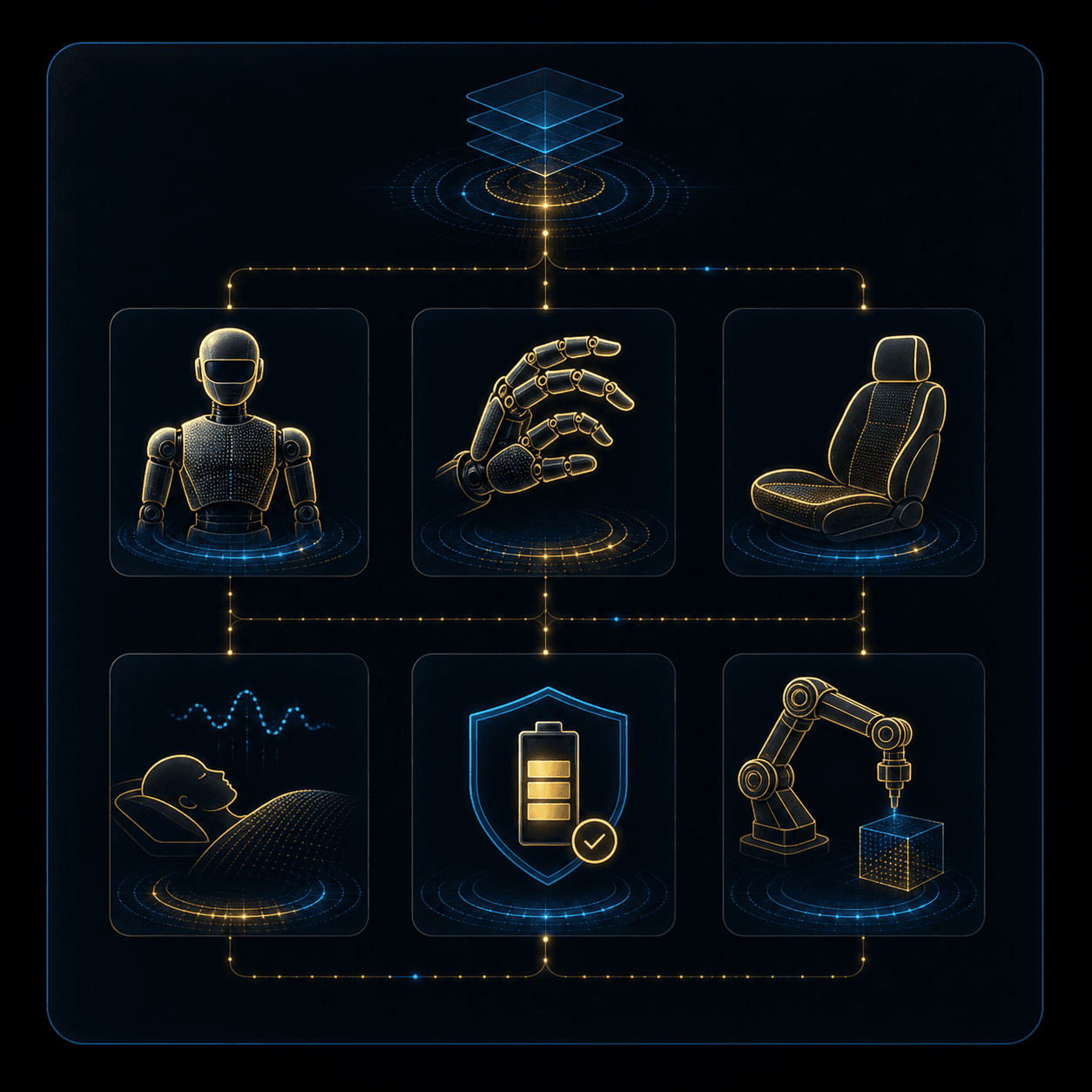
Core Product Matrix
核心产品矩阵
以触觉硬件为入口,把真实接触转化为可训练、可回流、可持续增长的物理交互数据。
Flagship Sensing Layer触觉让 AI 相信世界。
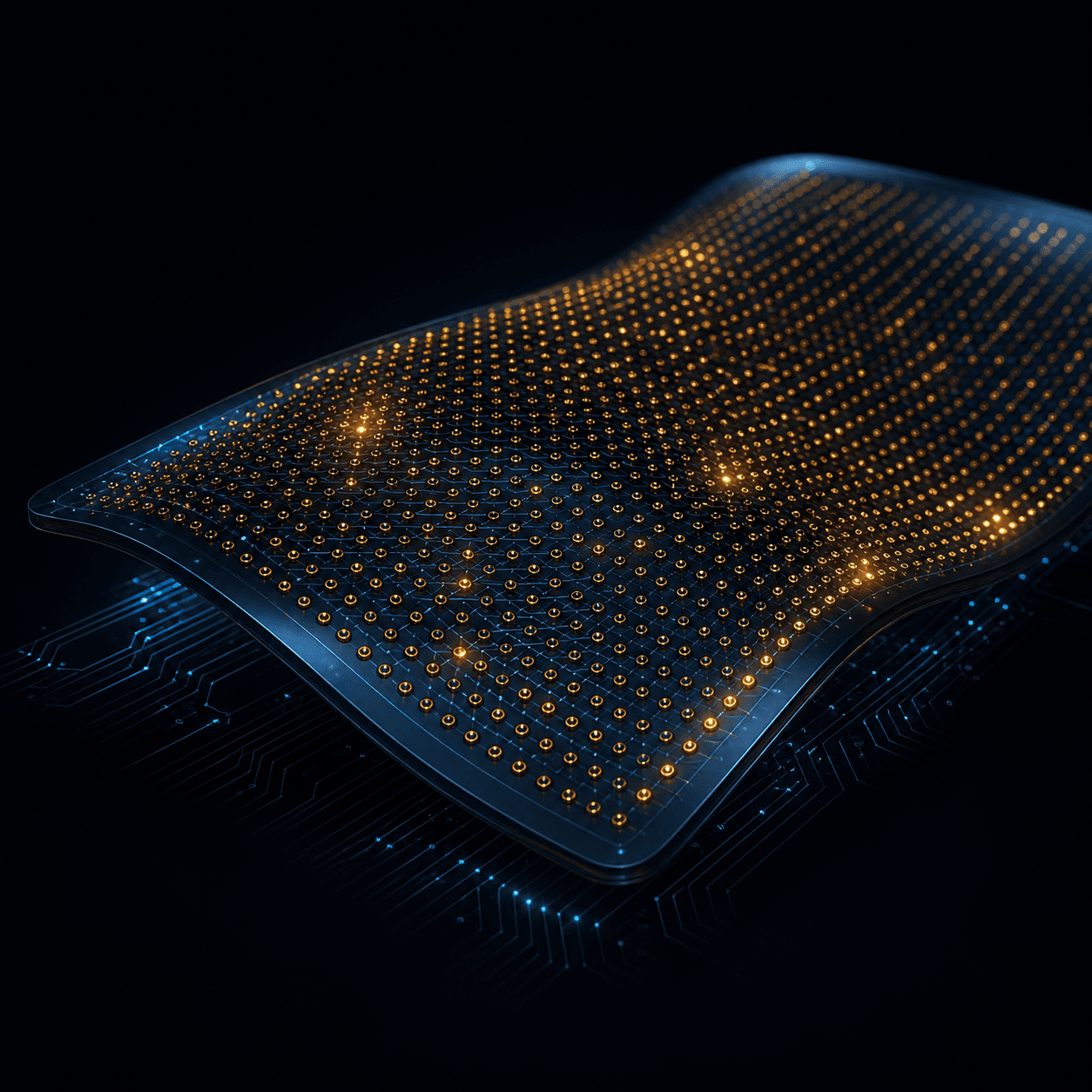
UltraMatrix
UltraMatrix™
从柔性触觉矩阵开始,构建机器人触觉数据底座UltraMatrix™ 是 NeuroSkin 触觉模型平台的数据入口。它以超高密度阵列捕捉接触、压力、滑移与形变,让机器人获得可训练的真实触觉反馈。
8192+ 触点捕捉细微接触变化
0.18mm 超薄结构适配复杂表面
将物理交互转化为可训练数据
超薄超柔性高密度曲面共形

8192+超高密度触点全域阵列
0.18mm超薄柔性行业领先
98%+压力检测精确度行业领先
<10ms实时触觉延迟业务领先
-40℃~85℃宽温稳定运行工业级可靠性

02
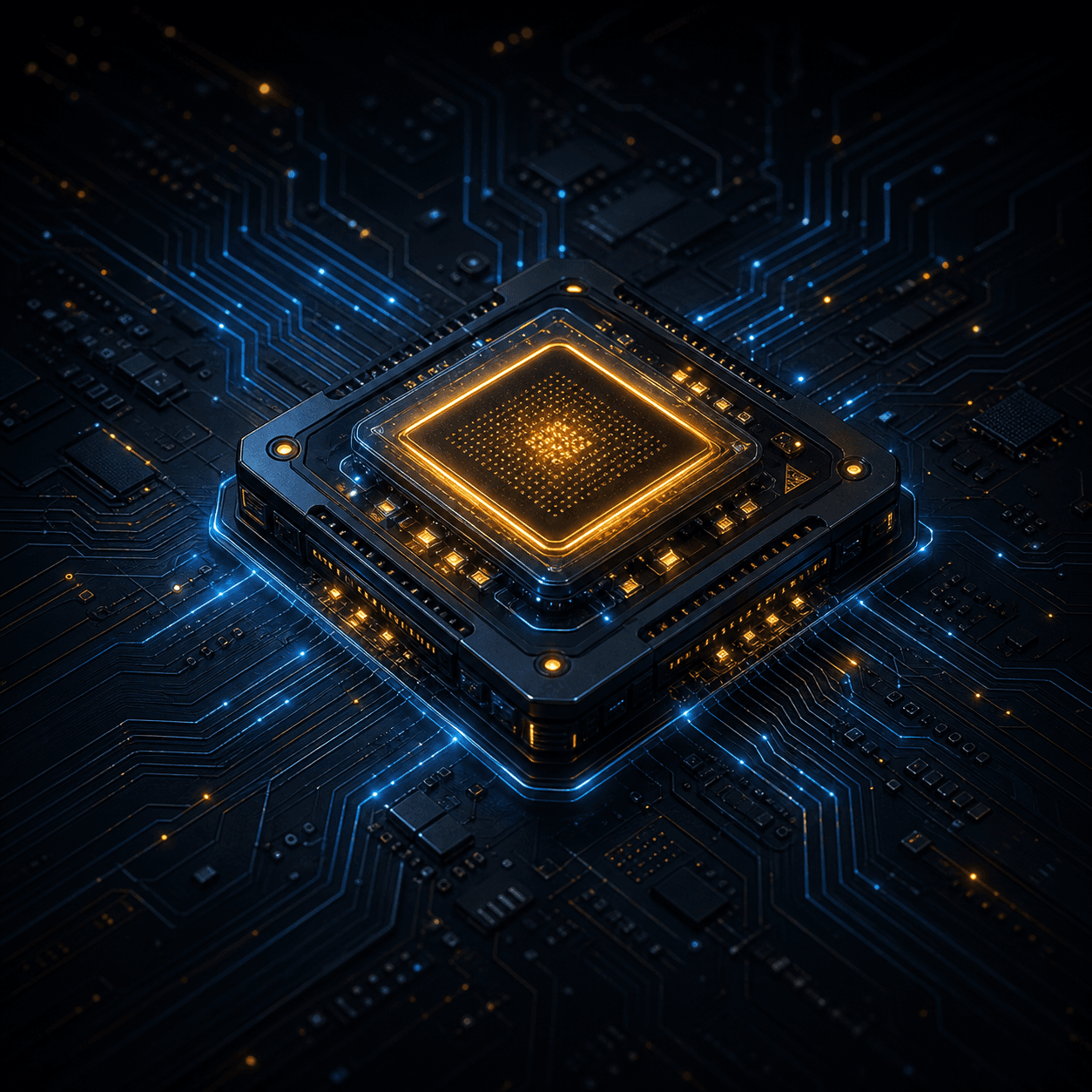
DexSense™
灵巧手指尖触觉
贴合指尖稳定抓取防滑反馈
灵巧手精密装配
03
NeuroSkin™
机器人全身电子皮肤
全身覆盖实时触觉数据回流
人形机器人服务机器人

04
SeatSense™
座舱姿态与压力感知
姿态识别压力分布座舱交互
智能座椅车门密封

05
SleepGuard™
睡眠与生命体征感知
心率呼吸睡眠分析离床提醒
智能床垫长期护理

06
Battery Safety System
电池压力安全预警
压力监测异常预警热失控预防
动力电池储能系统
NeuroSkin Data Flywheel
NeuroSkin 数据飞轮
NeuroSkin 把机器人每一次真实接触,变成可训练、可回流、可增长的数据资产。
部署感知网络
电子皮肤覆盖手、臂、躯干与真实场景。
采集真实接触
记录压力、滑移、摩擦、形变与动作结果。
训练并反哺能力
模型学习接触规律,再提升抓取与操作。
部署
触觉覆盖机器人与场景。
采集
记录接触、压力与滑移。
治理
整理成可训练数据。
训练
学习真实接触规律。
增强
提升抓取与操作能力。
部署越多,数据越多;数据越多,机器人越懂物理世界。
Full-Stack Tactile Intelligence Architecture
全栈触觉技术架构
触曼感知将柔性阵列、芯片、算法、云平台与行业应用整合为一套可扩展基础设施。
感知层
Sensing Layer
把真实接触变成高密度触觉信号。
- UltraMatrix
- NeuroSkin
- 柔性阵列
芯片层
Chip Layer
在边缘完成低功耗采集与传输。
- NeuroSkin SoC
- Edge AI
- 低功耗
算法层
Algorithm Layer
理解力、滑移、摩擦与纹理特征。
- Force
- Slip
- Friction

平台层
Platform Layer
让数据回流、训练模型并持续优化。
- Data Flywheel
- Model Training
- API/SDK
应用层
Application Layer
面向机器人、座舱、健康与能源场景。
- 机器人
- 智能座舱
- 电池安全
Technology Moat
核心技术壁垒
从材料、阵列、芯片到算法与数据飞轮,NeuroSkin 将触觉能力沉淀为可持续扩大的系统壁垒。
 01
01触觉分辨率
UltraMatrix
高密度触点把接触细节转化为可计算信号。
 02
02材料与结构
Flexible Materials
柔性结构贴合曲面,让传感层真正进入复杂物体。
 03
03触觉理解
Touch AI
从压力、滑移、摩擦和纹理中理解接触状态。
 04
04数据闭环
NeuroSkin Flywheel
真实触觉数据持续回流,让模型越用越强。
 05
05基础模型
Tactile Foundation Model
把触觉经验沉淀为跨场景复用的物理智能能力。
技术为基,数据增长为盾,构建不可复制的触觉智能护城河。
Future Vision
触觉智能的未来路径
从底层能力到行业场景,再到开放生态,NeuroSkin 持续把真实触觉带入物理智能时代。
 01
01底层能力
技术持续进化
更密、更敏、更低功耗,让触觉层进入更多复杂表面。
- 高密阵列
- 低功耗芯片
- 柔性集成
 02
02行业落地
场景持续扩展
让机器人、座舱、健康与能源设备拥有可靠触觉反馈。
- 具身机器人
- 智能座舱
- 健康与能源
 03
03开放协作
生态持续共建
以平台、数据和标准连接伙伴,推动触觉智能规模化应用。
- 开发者平台
- 行业标准
- 全球合作